Thesis
L. Bartolomei, “Towards Robust Active Planning for Autonomous Aerial Navigation”. Doctoral Thesis, ETH Zurich, 2023.
[pdf | ETH research collection]
Journals
L. Bartolomei, L. Teixeira, and M. Chli, “Fast Multi-UAV Decentralized Exploration of Forests”. In IEEE Robotics and Automation Letters, 2023.
[pdf | Bibtex | Video | Code]
D. Morilla-Cabello, L. Bartolomei, L. Teixeira, E. Montijano, and M. Chli, “Sweep-Your-Map: Efficient Coverage Planning for Aerial Teams in Large-Scale Environments”. In IEEE Robotics and Automation Letters, 2022.
[pdf | Bibtex | Video]
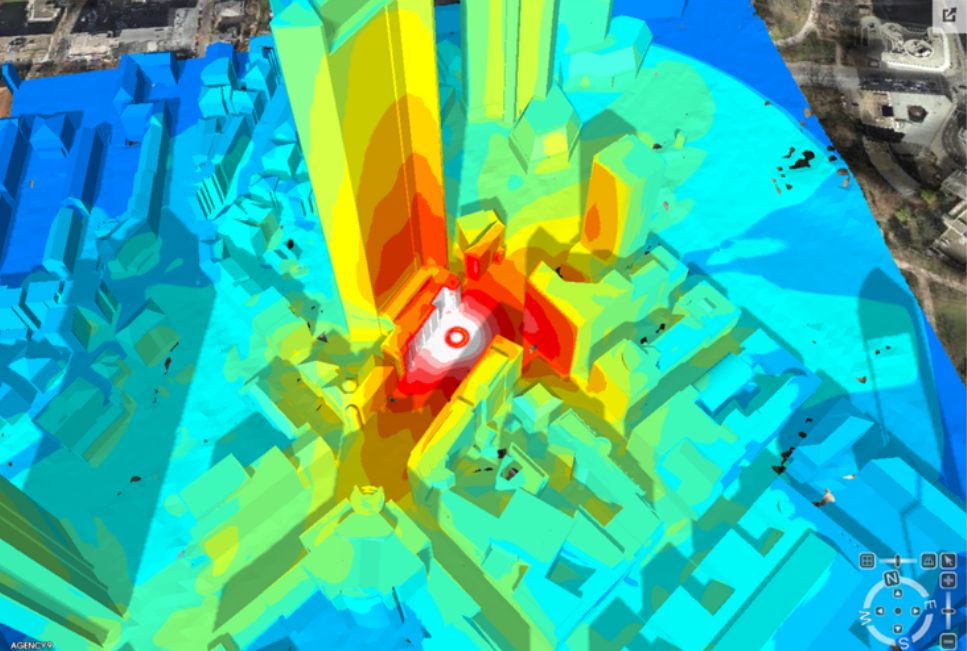
Y. Kompis, L. Bartolomei, R. Mascaro, L. Teixeira and M. Chli, “Informed Sampling Exploration Path Planner for 3D Reconstruction of Large Scenes”. In IEEE Robotics and Automation Letters, 2021.
[pdf | Bibtex | Video]
Conferences
S.Bone, L. Bartolomei, F. Kennel-Maushart and M. Chli, “Decentralised Multi-Robot Exploration using Monte Carlo Tree Search”. In IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2023.
[pdf | Bibtex | Video | Code]
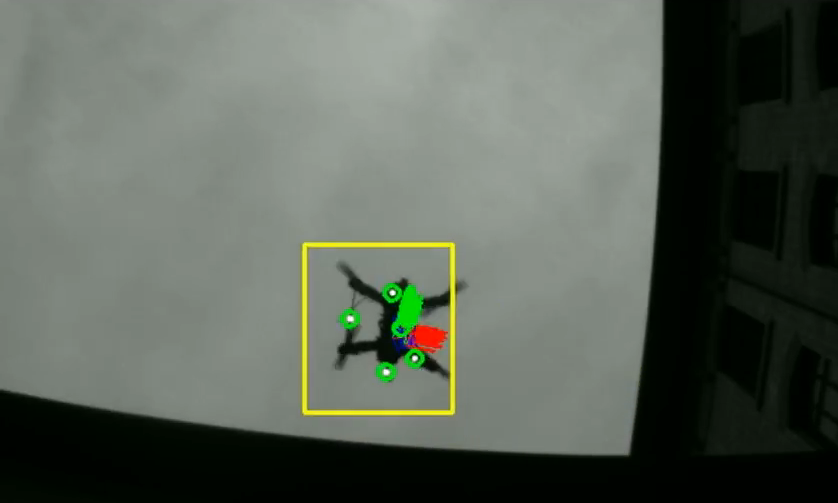
L. Bartolomei, Y. Kompis, L. Teixeira and M. Chli, “Autonomous Emergency Landing for Multicopters using Deep Reinforcement Learning”. In IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2022.
[pdf | Bibtex | Video | IROS Presentation | Code]
Y. Pan, Y. Kompis, L. Bartolomei, R. Mascaro, C. Stachniss and M. Chli, “Voxfield: Non-Projective Signed Distance Fields for Online Planning and 3D Reconstruction”. In IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2022.
[pdf | Bibtex | Video | Code]
M. Hüppi, L. Bartolomei, R. Mascaro and M. Chli, “T-PRM: Temporal Probabilistic Roadmap for Path Planning in Dynamic Environments”. In IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2022.
[pdf | Bibtex | Video | IROS Presentation | Code]
L. Bartolomei, L. Teixeira and M. Chli, “Semantic-aware Active Perception for UAVs using Deep Reinforcement Learning”. In IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2021.
[pdf | Bibtex | Video | IROS Presentation]
L. Bartolomei, L. Teixeira and M. Chli, “Perception-aware Path Planning for UAVs using Semantic Segmentation”. In IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2020.
[pdf | Bibtex | Video | IROS Presentation]
L. Bartolomei, M. Karrer and M. Chli, “Multi-robot Coordination with Agent-Server Architecture for Autonomous Navigation in Partially Unknown Environments”. In IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2020.
[pdf | Bibtex | Video | IROS Presentation | Code]
A. Gawel, H. Blum, J. Pankert, K. Krämer, L. Bartolomei, S. Ercan, F. Farshidian, M. Chli, F. Gramazio, R. Siegwart, M. Hutter and T. Sandy, “A Fully-Integrated Sensing and Control System for High-Accuracy Mobile Robotic Building Construction”. In IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2019.
[pdf | Bibtex | Video]
Workshops
Y. Kompis, L. Bartolomei and M. Chli, “Fully Autonomous Live 3D Reconstruction with an MAV: Hardware-and Software-Setup”. In Research Demos at International Conference on 3D Vision (3DV), 2021.
[pdf | Bibtex | Video | Code]
H. Blum, S. Rohrbach, M. Popovic, L. Bartolomei and R. Siegwart, “Active Learning for UAV-based Semantic Mapping”. In Workshop on Informative Path Planning and Active Sampling, RSS Workshop, 2019.
[pdf | Bibtex]